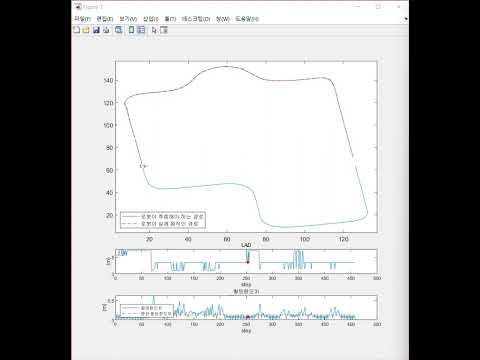
This project aims to enhance the Pure Pursuit path-following algorithm using reinforcement learning with MATLAB's Reinforcement Learning Toolbox. The focus is on adaptively optimizing the Look-Ahead Distance (LAD) parameter to maximize path-following performance.
- Implementation of the Pure Pursuit algorithm
- Reinforcement learning-based optimization of the LAD parameter
- Utilization of MATLAB and Reinforcement Learning Toolbox
- Performance evaluation through simulation and real data testing
Requirements for using this project:
- MATLAB (Recommended version: 2021b or newer)
- Reinforcement Learning Toolbox
- Additional MATLAB Toolboxes as required
- Seongbin Joe
- Younghoon Ko
- Seungheon Lee
- Taegyeom Lee
Email: harold3312@naver.com
Goel, A., & Chauhan, S. (2021). Adaptive Look-ahead distance for Pure Pursuit Controller with Deep Reinforcement Learning Techniques. In Proceedings of the AIR2021, June 30-July 4, Visvesvaraya National Institute of Technology, Nagpur, India.