Weijie Wang1,*
Zimu Li1,*
Jinchuan Shi1
Zeyu Zhang1
Botao Ye2,3
Marc Pollefeys2,4
Donny Y. Chen5
Bohan Zhuang1
1Zhejiang University 2ETH Zurich 3ETH AI Center 4Microsoft 5Monash University

TriSplat is a feed-forward 3D reconstruction model that predicts simulation-ready triangle meshes from sparse, unposed images. Unlike Gaussian-splatting pipelines that require post-hoc mesh extraction, TriSplat directly predicts oriented triangle primitives, camera poses, point maps, and appearance attributes in one forward pass. We train on RealEstate10K and DL3DV, and evaluate zero-shot generalization on ScanNet with RE10K-trained models.
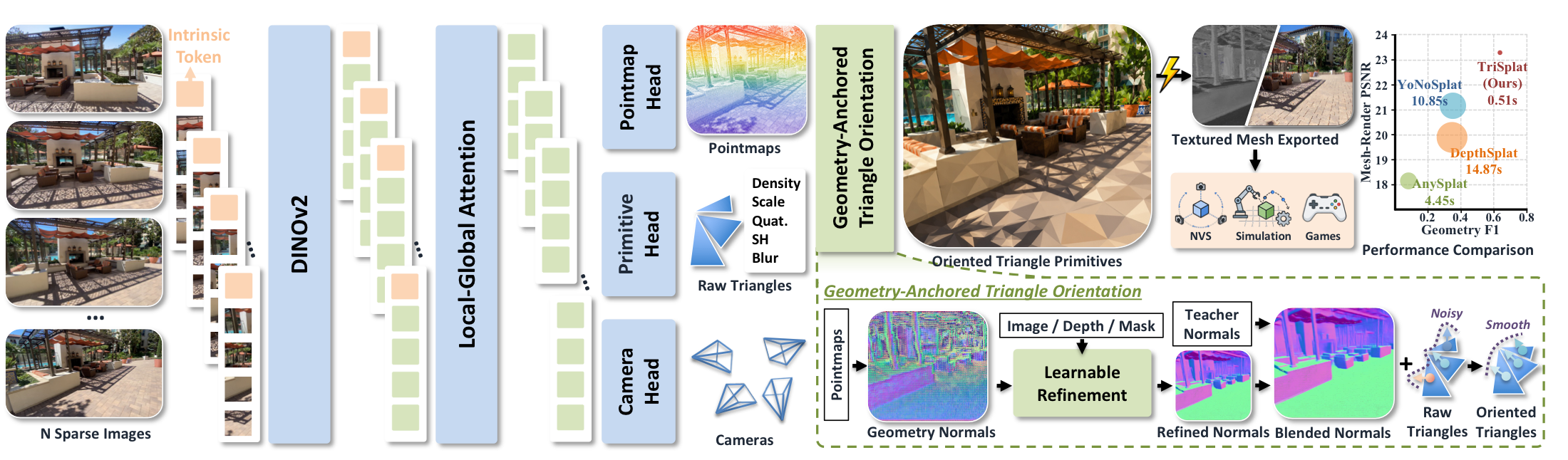
Given sparse input views, TriSplat predicts dense local point maps, triangle attributes, camera poses, and optional intrinsics. Point-map geometry anchors triangle orientation through geometry normals, a learned normal refiner, and a monocular-normal bootstrap. A differentiable triangle rasterizer renders RGB, depth, and normals, while mesh export only needs opacity filtering, winding correction, and duplicate-vertex merging.
Create the environment:
conda create -y -n trisplat python=3.10
conda activate trisplat
pip install --upgrade pipInstall PyTorch and Python dependencies:
pip install torch==2.1.2 torchvision==0.16.2 torchaudio==2.1.2 \
--index-url https://download.pytorch.org/whl/cu118
pip install -r requirements.txt --no-build-isolationBuild CUDA extensions:
bash scripts/env/rebuild_extensions.shDownload initialization weights used by the model:
mkdir -p pretrained_weights
wget -O pretrained_weights/pi3.safetensors \
https://huggingface.co/yyfz233/Pi3/resolve/main/model.safetensors
wget -O pretrained_weights/omnidata_dpt_normal_v2.ckpt \
'https://zenodo.org/records/10447888/files/omnidata_dpt_normal_v2.ckpt?download=1'Download released TriSplat checkpoints from lhmd/TriSplat:
mkdir -p checkpoints
wget -O checkpoints/re10k_trisplat.ckpt \
https://huggingface.co/lhmd/TriSplat/resolve/main/re10k_trisplat.ckpt
wget -O checkpoints/dl3dv_trisplat.ckpt \
https://huggingface.co/lhmd/TriSplat/resolve/main/dl3dv_trisplat.ckptPacked .torch datasets default to:
data/re10k
data/dl3dv
You can also set:
export RE10K_ROOT="$PWD/data/re10k"
export DL3DV_ROOT="$PWD/data/dl3dv"See data/README.md for dataset layout and conversion notes.
Train on RealEstate10K:
bash scripts/train/train_re10k.sh --gpus 0,1,2,3,4,5,6,7 --wandb-mode offlineTrain on DL3DV:
bash scripts/train/train_dl3dv.sh --gpus 0,1,2,3,4,5,6,7 --wandb-mode offlineExtra arguments after -- are passed to Hydra. Use --ckpt to resume or initialize from a checkpoint.
Evaluate and render RealEstate10K meshes:
bash scripts/eval/eval_re10k_mesh.sh \
--ckpt checkpoints/re10k_trisplat.ckpt \
--data-root "$RE10K_ROOT"Evaluate and render DL3DV meshes:
bash scripts/eval/eval_dl3dv_mesh.sh \
--ckpt checkpoints/dl3dv_trisplat.ckpt \
--data-root "$DL3DV_ROOT"For raw custom images, use the plain torch inference script. It does not use the
Lightning Trainer or dataset DataModule; it loads images from a folder, runs
the pose-free encoder directly, and exports a direct triangle mesh plus predicted
camera poses:
python -m src.scripts.infer_custom_mesh \
--image-dir /path/to/images \
--ckpt checkpoints/re10k_trisplat.ckpt \
--out-dir outputs/custom_mesh/demo \
--num-views 2 \
--forceBy default the script uses the lightweight RE10K 2-view experiment and selects
views uniformly from the folder. Use --view-indices 0,5 to choose frames
explicitly. If camera intrinsics are unavailable, the script creates a normalized
pinhole camera from a 60 degree horizontal FOV; override this with --fov-deg or
--intrinsics-json.
The main outputs are:
outputs/custom_mesh/demo/mesh/DIRECT_triangle_mesh.ply
outputs/custom_mesh/demo/mesh/DIRECT_triangle_mesh_post.ply
outputs/custom_mesh/demo/predicted_c2w.json
outputs/custom_mesh/demo/inference_summary.json
Pass extra Hydra options with repeated --override flags, for example
--override mesh.tsdf_gs2d.direct_post_process=false to save only the raw direct
mesh.
TriSplat exports ordinary triangle meshes, so the output can be opened directly by common graphics and simulation tools. The evaluation scripts above write per-scene meshes under:
outputs/<eval_root>/<run_name>/<scene>/mesh/DIRECT_triangle_mesh.ply
outputs/<eval_root>/<run_name>/<scene>/mesh/DIRECT_triangle_mesh.off
outputs/<eval_root>/<run_name>/<scene>/mesh/DIRECT_triangle_mesh_post.ply
outputs/<eval_root>/<run_name>/<scene>/mesh/DIRECT_triangle_mesh_post.off
The _post mesh is the default rendering and simulation output. Direct triangle
meshes use quantile geometry cleanup to remove non-finite, degenerate, very large,
or distant triangle outliers before compacting referenced vertices. TSDF meshes
still use connected-component cleanup. For example, after running
scripts/eval/eval_re10k_mesh.sh, use:
ls outputs/re10k_mesh_eval/re10k_mesh_eval/*/mesh/DIRECT_triangle_mesh_post.plyThe exported _post.ply mesh is vertex-colored and can be imported into Blender, Open3D, Isaac Sim, Unity, or PyBullet as a static triangle mesh. For simulation, use the .ply mesh for visual geometry and generate a collision mesh in your simulator if needed; for example, simplify or convex-decompose it before rigid-body simulation when the raw mesh is too dense.
If you find this repository useful, please cite:
@article{wang2026trisplat,
title={TriSplat: Simulation-Ready Feed-Forward 3D Scene Reconstruction},
author={Wang, Weijie and Li, Zimu and Shi, Jinchuan and Zhang, Zeyu and Ye, Botao and Pollefeys, Marc and Chen, Donny Y. and Zhuang, Bohan},
journal={arXiv preprint arXiv:2605.26115},
year={2026}
}This codebase builds on open-source work including YoNoSplat, MVSplat, pixelSplat, CroCo, DINOv2, Omnidata, 3D Gaussian Splatting, and Triangle Splatting.